
Indexed In
- Open J Gate
- Genamics JournalSeek
- Academic Keys
- ResearchBible
- Cosmos IF
- Access to Global Online Research in Agriculture (AGORA)
- Electronic Journals Library
- RefSeek
- Directory of Research Journal Indexing (DRJI)
- Hamdard University
- EBSCO A-Z
- OCLC- WorldCat
- Scholarsteer
- SWB online catalog
- Virtual Library of Biology (vifabio)
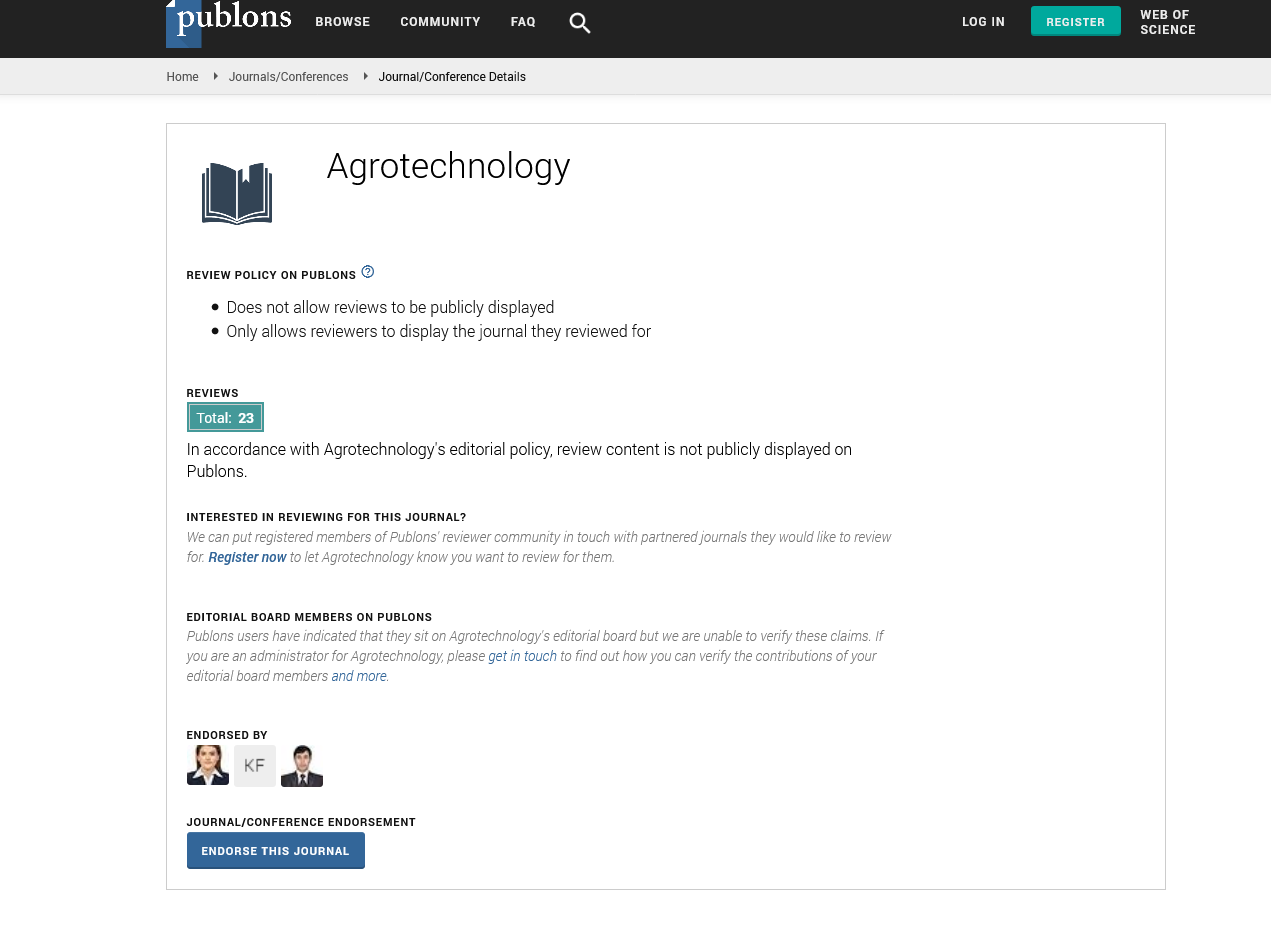
- Publons
- Geneva Foundation for Medical Education and Research
- Euro Pub
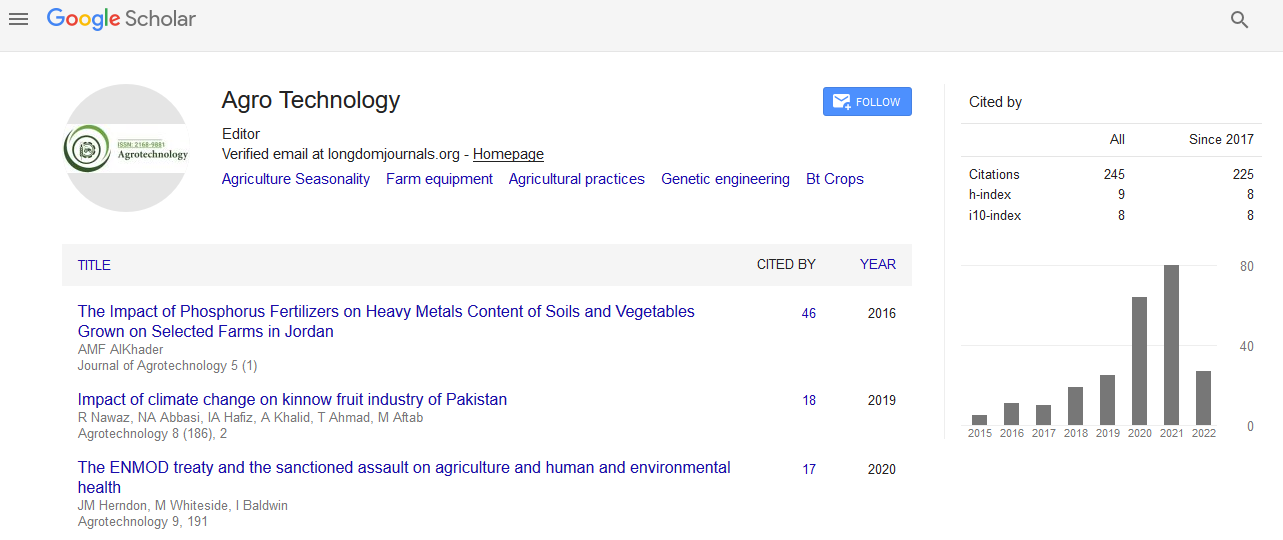
- Google Scholar
Useful Links
Share This Page
Journal Flyer

Open Access Journals
- Agri and Aquaculture
- Biochemistry
- Bioinformatics & Systems Biology
- Business & Management
- Chemistry
- Clinical Sciences
- Engineering
- Food & Nutrition
- General Science
- Genetics & Molecular Biology
- Immunology & Microbiology
- Medical Sciences
- Neuroscience & Psychology
- Nursing & Health Care
- Pharmaceutical Sciences
From manned to full autonomy; factors influencing the development and adoption of automated agricultural field machinery
10th International Conference on AGRICULTURE & HORTICULTURE
October 02-04, 2017 London, UK
Scott A Shearer
Ohio State University, USA
Posters & Accepted Abstracts: Agrotechnology
Abstract:
The continuing evolution of agricultural field machinery is being shaped by technological developments in other sectors such as defense and transportation. Absent defense-related concerns, it is doubtful the private sector alone could have justified the expense of space-based radio navigation or Global Navigation Satellite Systems. Arguably, the single greatest factor supporting the automation of current agricultural field machinery has been the deployment of Controller Area Networks which were necessary to meet US and EU regulatory requirements for off-highway diesel engine emissions. The focus of this presentation is multifaceted; a review of historical trends in field machinery size, physical limitations faced by the industry, tradeoffs between mechanical life and technical obsolescence, evolving automation technologies in other sectors, and soil health. So what factors will accelerate the transition from manned to fully autonomous agriculture vehicles? Perhaps the current emphasis on reducing labor costs through up-sizing equipment (>30,000 kg) will begin to lose its appeal as producers learn more about the damage done to soil structure. Or, farmers may demand that machinery life be brought in line with technical obsolescence. The first commercially successful autonomous agricultural vehicles will be low power (<50 kW) and lightweight (< 4,000 kg). The shift to smaller equipment will be accompanied by a reduction in mechanical life (< 3,500 hrs.). Equipment designers will strive to develop iron with planned failure at obsolescence (approximately five cropping seasons). Further, symmetry will be utilized to minimize the number of parts required to build this machinery thereby increasing volume concomitant with reduced production and service costs. However, the single most crucial factor that will drive the transition from manned to supervised autonomous machinery will be increased agricultural productivity through mitigation of soil compaction via the use of lightweight (and low power), autonomous field machinery.