
Indexed In
- Open J Gate
- Genamics JournalSeek
- Academic Keys
- ResearchBible
- Cosmos IF
- Access to Global Online Research in Agriculture (AGORA)
- Electronic Journals Library
- RefSeek
- Directory of Research Journal Indexing (DRJI)
- Hamdard University
- EBSCO A-Z
- OCLC- WorldCat
- Scholarsteer
- SWB online catalog
- Virtual Library of Biology (vifabio)
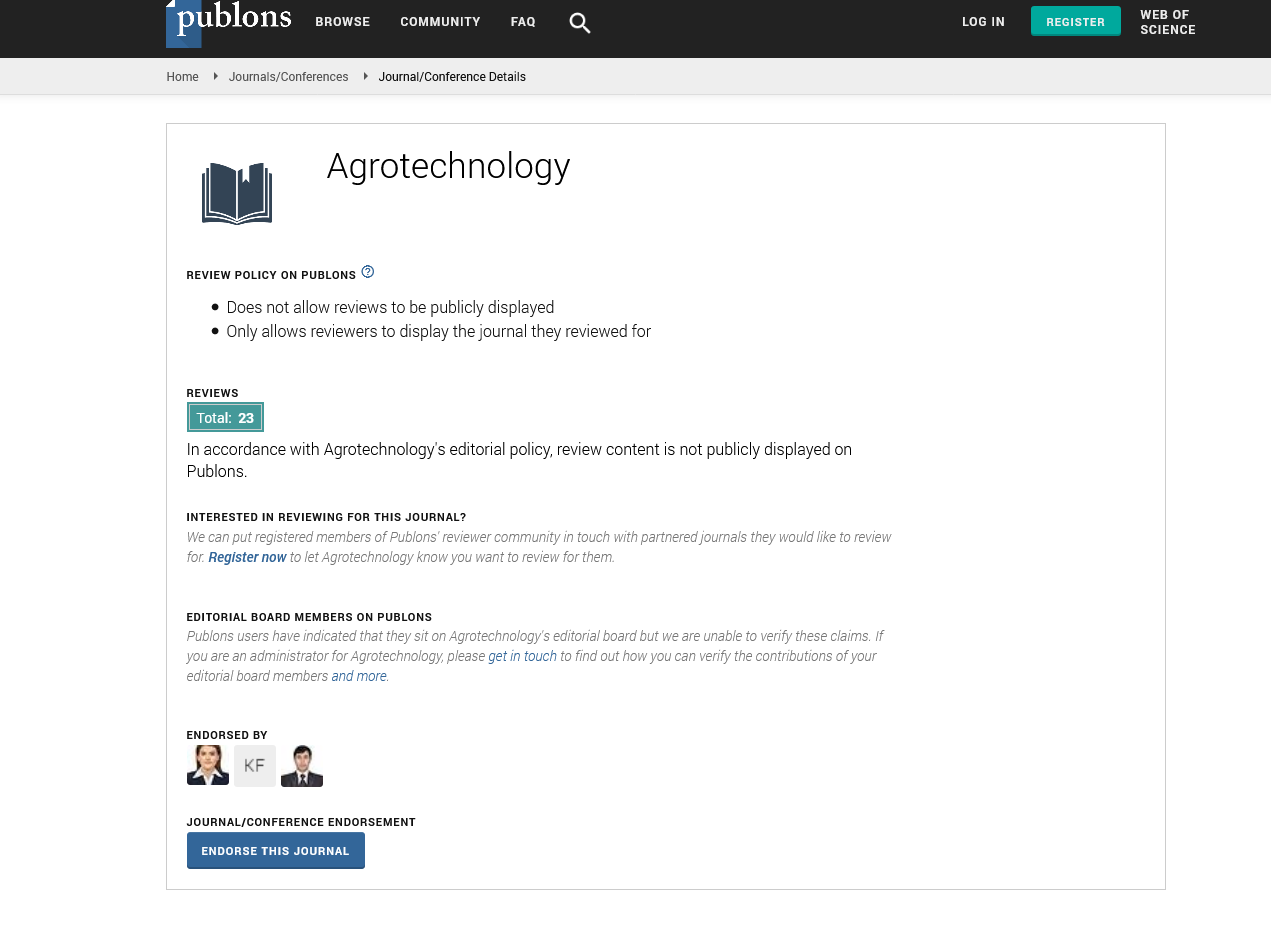
- Publons
- Geneva Foundation for Medical Education and Research
- Euro Pub
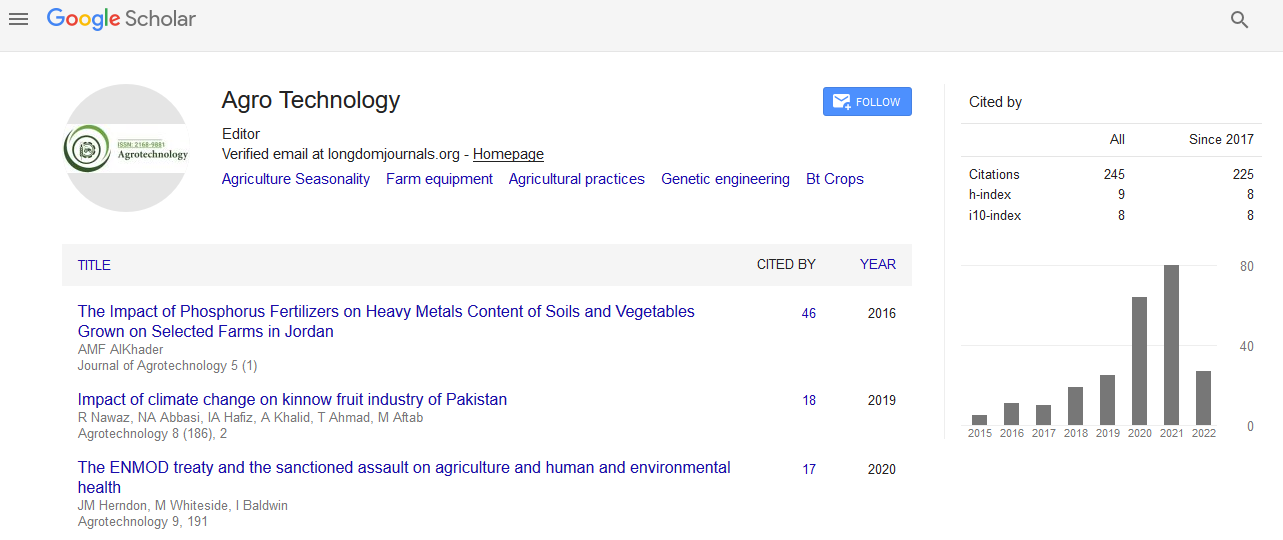
- Google Scholar
Useful Links
Share This Page
Journal Flyer

Open Access Journals
- Agri and Aquaculture
- Biochemistry
- Bioinformatics & Systems Biology
- Business & Management
- Chemistry
- Clinical Sciences
- Engineering
- Food & Nutrition
- General Science
- Genetics & Molecular Biology
- Immunology & Microbiology
- Medical Sciences
- Neuroscience & Psychology
- Nursing & Health Care
- Pharmaceutical Sciences
Discrete element modeling of soil loosening by a ripper
4th International Conference on Agriculture & Horticulture
July 13-15, 2015 Beijing, China
Ying Chen and Bo Li
Posters-Accepted Abstracts: Agrotechnol
Abstract:
Soil loosening is a very important performance indicator forsub-soiling tools. In this study, soil loosening effects from a ripper (a sub-soiling tool) was investigated through numerical modeling. To assist the model development, tests of the ripper were performed in a field with a clay soil texture. In the tests, the ripper was operated at a tillage depth of 300 mm and travel speed of 3 km/h. Before testing, soil cone indices of the undisturbed field were measured using a cone penetrometer; after testing, soil cone indices of the disturbed soil resulting from the ripper passage were measured. A soil-ripper model was developed to simulate the field operation of the ripperand its interaction with soil using the discrete element method (DEM). The model was able to predict soil swell factor which is commonly used to evaluate the extent of soil loosening by a tillage tool. The model ripper was 1:1 scale representation of ripper used in the field tests, and the spherical model soil particles had diameters varying from 3 to 30 mm. The soil-ripper model was calibrated and validated through comparing soil cone indices measured in the field and thoseobtained through virtual penetration tests performed to the assembly of the model particles. The validated soilripper model was used to further investigate soil swell factor as affected by the ripper working depths under differentinitial soil porosities.